Force Sensor Set 4F-FS001-W200
Kraftsensorset für Mitsubishi Roboter der F-Serie
- Funktion zur Steuerung von Robotern für die Handhabung von Objekten mit festgelegten Kräften.
- Funktion zur Steuerung der Steifheit von Robotergelenke.
- Funktion zur Umschaltung der Robotereigenschaften im Betrieb.
- Durch die Kombination von Positions- und Kraftinformationen können bei erfüllten Trigger-Bedingungen Interrupts ausgeführt werden.
- Funktion zur Erfassung von Kräften, Momenten und der Position bei Berührung.
- Funktion zur Anzeige von Kraftsensordaten und zur Erfassung von Maximalwerten.
- Funktion zur Erfassung von positions-synchronen Kraftsensorinformationen als Protokolldaten und deren Anzeige als Grafik
- Erlaubt in Roboterprogrammen die Verwendung von Start- und Stoppbefehlen für die Protokollierung.
- Funktion zur Übertragung von Protokolldateien zum FTP-Server
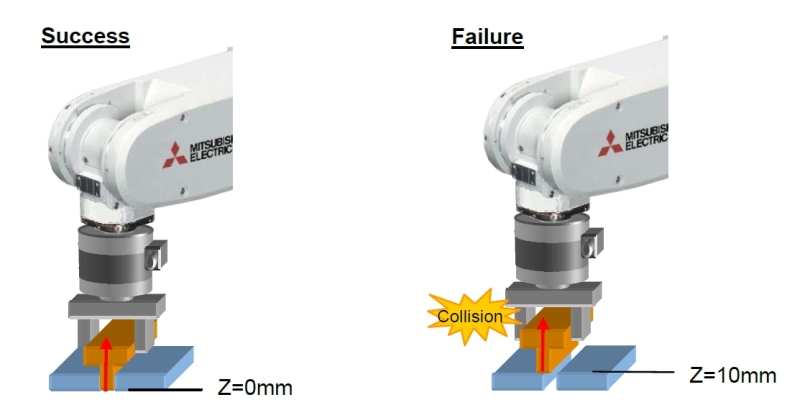
Beispiel für eine Kollisions-Überwachung
Beispiel für eine Bahnregelung

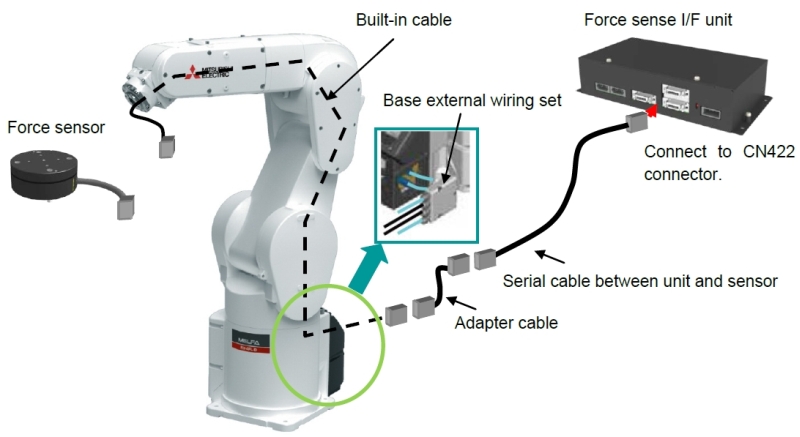
Beispiel Verkabelung des Kraftsensor
Für die Verkabelung können bereits intern verlegte Reserve-Kabel genutzt werden
UNIFEED®
Alle Vorteile des UNIFEED® auf einen Blick:
- Flexible Produktzuführung für unterschiedlichste Produkte.
- Schneller Wechsel auf andere Produkte.
- Taktzeiten von bis zu 50 Teilen/Min.
- Schnelle Verfügbarkeit/Lieferung des UNIFEED® weltweit.
- Hohe Produktivität und Verfügbarkeit – jegliches Verklemmen von Produkten ist ausgeschlossen.
- Die Oberfläche des Förderbandes kann angepasst werden, so dass auch z.B. runde Objekte oder Produkte mit schwierigen Geometrien gefördert werden können.
- Schnelles time to market, auch wenn noch Teileänderungen durchgeführt werden.
- Einsatz von Standardkomponenten.
- Schnelles Verbauen der korrekten Teile, kurze Verweilzeit im Feeder.
- Integrierte Qualitätskontrolle durch Bildverarbeitung möglich.
- Einfache Durchführung von Änderungen bei Optimierung von Musterteilen zu Serienteilen.
- Unkomplizierte Anschlusstechnik (230 VAC, Druckluft 6 bar).
- Palettierfunktion, Einsetz- und Fügeprozess möglich.
- Beleuchtung durch IR-Backlight (Umgebungslicht wird verringert) oder sichtbares Licht.
- Es wird kein zusätzlicher Schaltschrank benötigt.
- Der UNIFEED® ist in unterschiedlichen Breiten und Längen erhältlich,je nach Größe der zu verarbeitenden Produkte.
Funktion & Ablauf
Das Schüttgut wird in einem Teilebunker bereitgestellt. Hieraus werden die Teile über die Zuführung vereinzelt und dem Arbeitsbereich des Roboters zugeführt. Die Förderfläche (Band) wird definiert beschleunigt und gebremst. Die Beschleunigungs- und Bremsparameter sind parametrierbar und somit exakt auf das zu vereinzelnde Produkt abzustimmen. Die Vereinzelung der Produkte wird zusätzlich durch eine Rüttelfunktion unterstützt und die Teile werden lagerichtig positioniert.
Durch das fest installierte Bildverarbeitungssystem wird die exakte Position der verarbeitbaren Teile ermittelt. An dieser Stelle kann die Kamera durch die eingelernte Referenz der Produkte eine Güteüberprüfung vornehmen und somit ein schlechtes oder ein falsches Teil ermitteln.


Die ermittelten Koordinaten werden von der Kamera an den Roboter gesendet. Der Roboter fährt genau diese Position an, greift das Teil und legt es an einer definierten Stelle ab. Die Beleuchtung der Bildverarbeitung erfolgt durch ein IR-Backlight oder Weisslicht, das unter der transparenten Förderfläche angeordnet ist. Somit wird die optimale Ausleuchtung der Teile gewährleistet.
Es ist somit möglich, zeitgleich unterschiedliche Produkte auf dem UNIFEED® zu fahren. Die Teile müssen lediglich durch einen Teach-In-Vorgang des Bildverarbeitungs-Systems erlernt werden. Die Parameter einmal erlernter Teile/Produkte können abgespeichert werden und stehen dadurch jederzeit wieder zur Verfügung.
Systemlösungen
Mit unseren Systemlösungen rund um den Roboter haben Sie auch schwierige Prozesse schnell im Griff: Aufnehmen, Orientieren und Stapeln ungeordnet zugeführter Teile – kein Problem mit der Kombination aus Roboter, Bilderkennung und schneller Bildverarbeitung. Automatisiertes Erkennen von Fehlern und Mängeln an Bauteilen oder Artikeln mit anschließendem Aussortieren von Schlechtteilen – kein Problem für die Roboterlösung in Kombination mit automatisierter Bildverarbeitung. Automatisiertes Aufnehmen kontinuierlich transportierter Teile, Orientieren und lageorientiertes Stapeln auf Paletten oder Montageanlagen – mit der ausgereiften Kombination aus Roboter und Bildverarbeitung von ESS GmbH problemlos realisierbar. Automatisiertes Messen und Prüfen von Bauteilen – problemlos realisierbar in einer Roboterzelle mit integrierten Mess- und Sortierstationen. Profitieren Sie bei diesen Automatisierungslösungen vor allem von der hohen Flexibilität und dem universellen Einsatz der Roboter. Mit unserer mehrjährigen Spezialisierung und Erfahrung in allen benötigten Disziplinen, von der Steuerungstechnik über den Roboter bis zur Integration in ihre Produktion, beherrschen wir herausragende Spitzentechnologie.
Neben kundenspezifischen Lösungen bieten wir Ihnen auch unsere kostengünstigen und schnell verfügbaren Standardbausteine. Dazu gehört beispielsweise die universelle Roboter-Handling-Zelle rapido-D. Das ist High-tech auf kleinstem Raum. Flexibel für eine Vielzahl an Anwendungen. Bauteile und Artikel messen, prüfen, einlegen, entnehmen, orientieren, montieren oder Werkzeug- und Spritzgießmaschinen be- und entladen: rapido-D ist die wirtschaftliche Lösung für nahezu jede Handlingaufgabe.

Robotertracking
Lagerichtiges Greifen von Werkstücken vom laufenden Förderband
Automatisierungsaufgabe:
Bauteile, Werkstücke, Prüflinge sollen ohne zusätzlich am Förderband angebrachte Hilfsmittel lagerichtig, ohne jedoch das Förderband anzuhalten, gegriffen werden.
Automatisierungslösung:
Bauteile, Werkstücke, Prüflinge werden mittels einer Bildverarbeitungseinrichtung erfasst. Die von einem festgelegten Bezugspunkt abweichenden Koordinaten werden mittels serieller Schnittstelle oder auch über Ethernet an den Roboter weitergegeben. Der Roboter, welcher sich kontinuierlich mit der aktuellen Bandgeschwindigkeit synchronisiert, errechnet anhand der Koordinaten und der Form des Werkstücks, die aktuelle Greifposition. Der Roboter führt seinen Greifer synchron mit dem laufenden Förderband mit. Nach erfolgter Synchronisation des Greifers und des Werkstückes wird das Werkstück gegriffen. Nun kann das Werkstück lagerichtig weiterverarbeitet werden. Dies können verschiedene Aufgaben sein. Die lagerichtig gegriffenen Teile können vermessen, geprüft, beschriftet oder auch palettiert werden.
Ausführung der Systemlösung:
Roboter:
- 6-Achs Knickarm-Roboter mit Handlingsgewicht von 1-20 kg, Aktionsradius 200 – 1384 mm
- 4-Achs Scara-Roboter mit Handlingsgewicht von 1-20 kg, Aktionsradius 200 – 1000 mm
- Schnittstellen wahlweise Profinet / Ethernet
Kamera:
- Pictor, mögliche Auflösungen 640x480, 740x580, 1300x1024
- Schnittstellen wahlweise RS232 / Ethernetschnittstelle, 4/4 digitale Ein- Ausgänge, BNC/VGA/SVGA
- Beleuchtung je nach Anwendungsfall
Möglicher Aufbau der Systemlösung:
Technische Daten der Systemlösung:
| Handhabungsgewicht | bis maximal 20kg* |
| Reichweite Handflansch | bis maximal 1380mm* |
| mögliche Schnittstellen Roboter: | RS232/RS422/Ethernet/CC-Link/ProfibusDB/Profinet/16,32DEDA* |
| mögliche Schnittstellen Kamera: | /Ethernet/Profinet/4 DEDA |
| Bandgeschwindigkeit: | 0 bis 20m/min* |
| Greifgenauigkeit: | ca. 1/10mm** |
| mögliche Optionen: | Richtstation, Wendestation, Ansteuerung zusätzlicher Achsen |
| Einsatzgebiete: | Montage, Qualitätssicherung, vermessen, palettieren* abhängig vom Roboter |
* abhängig vom Förderband, Bauteil, und Förderbandgeschwindigkeit
Vorzüge der Systemlösung:
- Flexibel einsetzbar bei Produkten auch mit kurzen Laufzeiten
- Typenmix von Teilen auf einem Förderband möglich
- Kurze Anpass-, Umrüstzeiten, da Softwareanpassung oder auch nur Programmwechsel erforderlich ist
- Anpassbar an unterschiedliche Taktzeiten (Roboter synchronisiert sich automatisch mit der Bandgeschwindigkeit)
- Geringer Platzbedarf (kleine Steuerung (BxHxT) 212x166x290mm, kleiner Roboter, kleine Kamera)
- Geringer mechanischer Aufwand auch bei Neuteilen (je nach Werkstück sind nur neue Greiferbacken erforderlich)
- Arbeitsraumerweiterung mit bis zu 8 zusätzlichen Achsen